5 축 가공이란 무엇입니까? 즉,5 개의 다른 방향으로 이동할 수 있는 밀링 머신에서 부품을 제조하고 있습니다. 이 기계는 절삭 공구가 자유도가 높은 부품 주위에 도달 할 수 있습니다. 이것은 그(것)들에게 터보 기계장치 성분의 복잡한 모양을 맷돌로 갈기를 위한 이상을 만듭니다.
기계 구성
다축 밀링 머신에는 많은 변형이 있지만 터보 기계 부품 절단에 일반적으로 사용되는 5 축 기계에 중점을 둘 것입니다.
기본 예 3 축 밀링 머신은 공구를 수직으로 잡고 엑스,와이 및 지 방향으로 이동합니다. 이 경우 엑스 과 지 축은 공구를 이동하고 와이 축은 부품을 이동하지만 부품에 대한 결과 도구 모션은 오른 손잡이 좌표계를 형성합니다. 일반적으로 도구 축과 일치합니다.
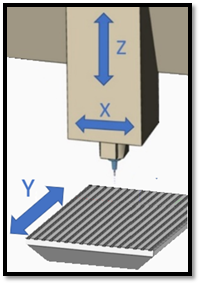
이미지 1-3 축 밀
이 3 축 구성에 두 개의 회전 축을 추가하여 총 5 개의 축을 제공 할 수 있습니다. 회전 축은 일반적으로 레이블이 지정됩니다 ㅏ,비 또는 씨 각각의 선형 축에 따라 엑스,와이,또는 지 그들은 회전합니다. 각 회전 축은 공구 또는 부품을 이동할 수 있지만 목표는 부품에 대한 공구의 방향을 허용하는 것입니다. 회전 축에 볼트로 고정하여 3 축 기계를 개조 할 수 있지만 많은 공작 기계 제조업체는 전용 5 축 구성을 제공합니다.
이미지 2 는 꽤 인기를 끌고있는 기계의 트러 니언 스타일을 보여줍니다. 축이 파트를 팁하고 축이 파트를 회전합니다. 기계 제작자에 따라 티핑 축이 표시 될 수도 있습니다. 이 부품은 수평 표면에 쉽게 고정 될 수 있습니다. 또한 질량 중심이 대략 축 중심선에 위치하도록 부품을 고정 할 수있어 필요한 회전 토크 힘을 줄일 수 있습니다.
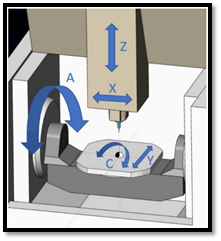
이미지 2-트러 니언 기계
그림 3 틸팅 스핀들 기계를 도시. 이 도구를 사용하면 부품을 회전 할 수 있습니다. 이 설정은 틸팅 스핀들이 약간의 강성을 잃지 만 부품을 동적으로 기울일 필요가 없기 때문에 더 큰 부품에 도움이됩니다.

이미지 3-비 축 스윙 헤드
이미지 4 는 갠트리 기계를 나타낸다. 2 개의 회전 축은 움직이는 다리 건설에 장착 된 지 축 램의 끝에 있습니다. 이 기계는 자전 테이블 및 진동 머리에 거치하기 에는 너무 무거운 큰 성분을 위해 적절합니다.
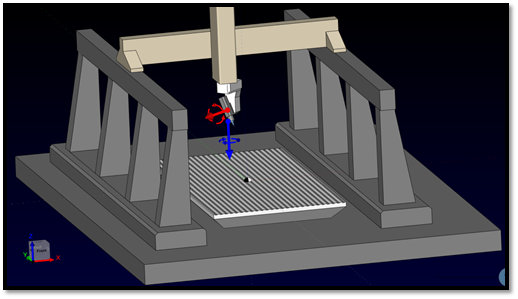
이미지 4-5 축 갠트리
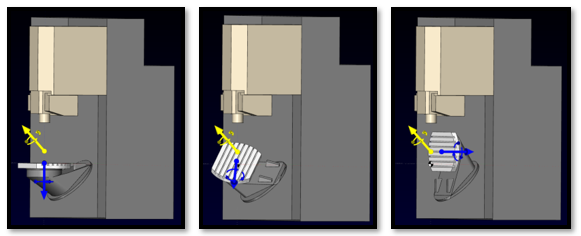
누타 이팅 머시닝 센터는 회전 축 중 하나가 비 직교 시스템에서 움직이는 소형 5 축 머시닝 센터입니다. 이미지 5 에서 노란색 회전 중심선을 수직에서 45 도에 유의하십시오. 이 구성을 사용하면 부품에 대한 공구 방향이 제한되어 블레이드 주위에서 완전히 밀링되는 것을 방지 할 수 있습니다. 그러나 노란색 벡터의 각도를 조정하면 기능이 확장 될 수 있습니다. 이미지 5 는 부품을 움직이는 회전 축을 모두 보여 주지만 너트 기계는 공구를 움직이는 회전 축을 가질 수도 있습니다.
5 축 밀링을 위한 소프트웨어
모든 5 축 운동학적 구성은 툴패스 프로그래밍을 어렵게 만들 수 있지만,다행히도 소프트웨어 솔루션은 개발 기술과 속도를 유지해 왔습니다.
캠(컴퓨터 지원 제조)시스템은 5 축 기계의 유연성을 활용하기 위해 다양한 다축 절단 전략을 제공합니다:
3+2 가공으로 절단 전에 회전 축을 배치하고 잠급니다. 이것은 무거운 절단을 위한 엄밀한 체제를 줍니다. 평면형 황삭 레벨은 보다 일관된 절삭 조건과 칩 두께를 제공하여 더 빠른 절삭을 가능하게 합니다. 3+2 가공은 또한 회전축이 종종 5 축 절단 중에 이송 제한 요소이기 때문에 더 빠른 이송을 허용 할 수 있습니다.
4+1 기계로 가공은 조정 위치에 회전하는 도끼의 한을 둡니다. 이것은 공구 부품 충돌을 피하기 위해 다른 회전 축의 더 많은 움직임이 필요할 수 있지만 한 회전 축의 원치 않는 움직임을 제거하는 것이 바람직 할 수 있습니다. 4+1 프로그래밍은 물론 기계에 5 번째 축이 없는 경우에도 유용합니다.
5 축 동시 운동은 터보 기계 구성 요소에 대한 필요성이다. 모든 5 개의 도끼는 충돌 없이 잎의 주위에 그리고 주머니를 통해서 공구를 인도하기 위하여 즉시 움직입니다. 이를 통해 황삭 및 유동 마무리 모두에 대해 원활한 중단없는 절삭이 가능합니다. 토크 모터 회전 장치가 장착 된 최신 기계는 고속 5 축 절단을 허용합니다.
최신 캠 소프트웨어는 또한 5 축 가공 공정을 시뮬레이션 할 수 있습니다. 이를 통해 충돌,초과 이동(스트로크 제한)조건 및 기타 잠재적 위험에 대한 보고서를 통해 복잡한 기계 동작을 명확하게 시각화 할 수 있습니다. 프로그래머는 부품,고정 장치,공구 및 밀링 머신이 모두 안전하고 적합하다는 것을 쉽게 확인할 수 있습니다.
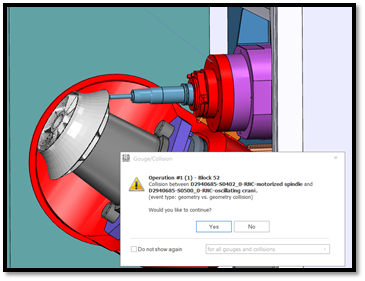
이미지 6-기계 시뮬레이션 충돌 감지
이 기능은 공구의 절삭 부분이 공작물과 일정한 직선 접촉을 유지하도록 설계된 기계 컨트롤러 내의 선택적 기능입니다. 이 툴팁은 명령된 5 축 위치 사이에서 손상되는 스캘러핑 동작을 할 수 있습니다. 따라서 기계 컨트롤러가 축 값을 계산하기 때문에 캠 시스템의 후처리 작업이 간소화됩니다. 따라서 공구 경로 파일은 더 일반적이고 다재다능하므로 한 고정 장치에서 다른 장치로 또는 한 시스템에서 다른 시스템으로 더 쉽게 전송할 수 있습니다. 기계 작업자는 공작물 기준 원점을 쉽게 조정할 수 있으며 작업을 다시 게시 할 필요가 없습니다. 도구 경로에는 특정 고정 장치 설정에 대한 하드 코딩 오프셋이 있을 수 있습니다. 또한 피드 프로그래밍을 더 쉽게 만듭니다. 단 한 번의 급지 명령만 필요하며 이 컨트롤은 공작물에 비해 공구 팁 속도를 유지합니다. 비 직관적 인 역 시간 피드는 각 라인에 프로그래밍되어야합니다.
콘셉트 엔렉에서 우리는 터보 기계 전문가의 광범위한 청중을 보유하고 있습니다. 너가 제조안에 그때 이 개요는 치료 이,다른 사람을 위해 우리는 약간 통찰력을 제공하고 너를 너의 기계 공장에 아래로 산책하나 곳에 너의 부속이 하는 납품업자를 방문하는 격려한다 것 을 희망한다.