i dette projekt vil vi gå over, hvordan man opbygger en bevægelsesdetektor alarm kredsløb.
dette er et alarmkredsløb, der slukker, når der registreres bevægelse eller bevægelse. Når det registrerer denne bevægelse, kredsløbet vil udløse en alarm summer til lyd, som vil forblive på, indtil strømmen er afbrudt fra kredsløbet.Dette alarmkredsløbs mest almindelige anvendelse er at registrere en person, der bevæger sig gennem et område, hvor bevægelsesdetektoren kan fornemme.
før dette byggede vi et enklere bevægelsesdetektor kredsløb, der tændte en LED, når bevægelse blev registreret. Men 1 eller 2 sekunder efter ville LED ‘ en slukke. Forskellen mellem det kredsløb og dette, som vi nu bygger, er, at en alarm skal forblive tændt, når den er aktiveret, indtil den manuelt slukkes, f.eks. Hvis en alarm bare gik ud en gang og stoppede, ville det ikke være meget af en alarm. Når der er registreret bevægelse med dette kredsløb, tænder det summeren, som brummer, indtil kredsløbet afbrydes manuelt. Dette svarer til en alarm, der kun slukker, når en boligejer indtaster adgangskoden for at slukke den.
i vores kredsløb, når bevægelsesdetektorens kredsløb opfanger bevægelse, tændes en summer og forbliver tændt, indtil strømforsyningen er afbrudt.
nødvendige dele til bevægelsesdetektor Alarmkredsløb
- PIR bevægelsessensor
- Arduino
- 1.5-3V Summer
vi bruger en lavspændingssummer til dette kredsløb, en der kun har brug for 1,5 V til 3V for at fungere. Du kan dog bruge enhver summer, der kan fungere med 5V strøm eller mindre. Hvis du kun har summere, der har brug for mere spænding, skal du tænde summeren med en ekstern strømkilde. I stedet for at forbinde summerens anode til 5V-terminalen på arduino, ville du forbinde den til en ekstern spændingskilde, hvilket giver den den nødvendige spændingsommer ville have brug for.
den vigtigste elektroniske komponent, vi vil bruge, der giver os mulighed for at hente denne detektion, er PIR-bevægelsessensoren. PIR-bevægelsessensoren er en sensor, der registrerer bevægelse gennem opsamling af infrarøde bølger. At være, at en person udsender infrarød stråling, er detektoren i stand til at detektere denne stråling og reagere i henhold til hvordan kredsløbet er designet til at reagere. At være, at folk naturligt afgiver infrarød stråling (varmeenergi) på grund af vores genererede kropsvarme, kan sensoren let registrere folk, der går og bevæger sig gennem en nærhed inden for Sensorens rækkevidde. Sensoren kan også hente bevægelsen af livløse genstande, sådan en rullende kugle, for når disse objekter bevæger sig, virker friktion på dem og genererer varme. Dette heatemits infrarød stråling, som PIR sensorer kan være i stand til at detektere, hvis nok stråling er afgivet.
bevægelsessensoren har et følsomhedsområde på op til 20 fod (6 meter) og et detektionsområde på 110 kg 70 liter, hvilket gør det til en bred linsedetektionssensor. Dette betyder, at det kan måle 110 liter lodret (fra top til bund) og 70 liter vandret (fra venstre mod højre). Den bedste måde at kontrollere dens følsomhed på er, når kredsløbet er bygget, prøv at bevæge dig rundt gennem alle dets vinkler. Se i hvilke vinkler det kan registrere din bevægelse, og i hvilke vinkler det ikke er i stand til at registrere din bevægelse, hvilket betyder, at du er ude af dens vinkelomfang. Meget af det er trial and error og eksperimenterer. Når du ved, hvor det kan og ikke kan registrere, kan du placere det på et optimalt sted, hvor det kan registrere i områder, hvor du vil have det.
PIR-bevægelsessensoren er en 3-polet enhed. Nedenfor er pinout af denne enhed:
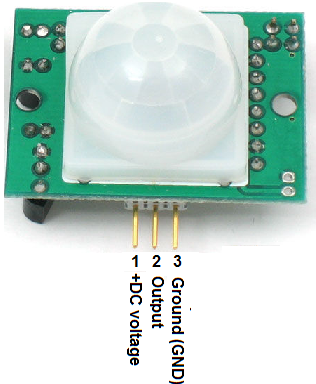
Pin 1 er stiften, der modtager den positive jævnspænding. PIR-bevægelsessensoren har brug for mellem 5V-9vdc strøm til drift.
Pin 2 er udgangsstiften på PIR-modulet. Det er her output fra PIR vil forlade fra. Når bevægelse registreres af PIR, vil dens output gå højt til 3V. når der ikke registreres nogen bevægelse, er dens output lav, og den afgiver praktisk talt ingen spænding. Når du er høj, kan du se, hvordan den kan drive en belastning, f.eks. På denne måde kan vi vide, hvornår den har registreret bevægelse eller ej.
Pin 3 er enhedens negative jævnspænding eller jordstift. Vi forbinder strømkildens negative terminal til denne pin, foren returvej.
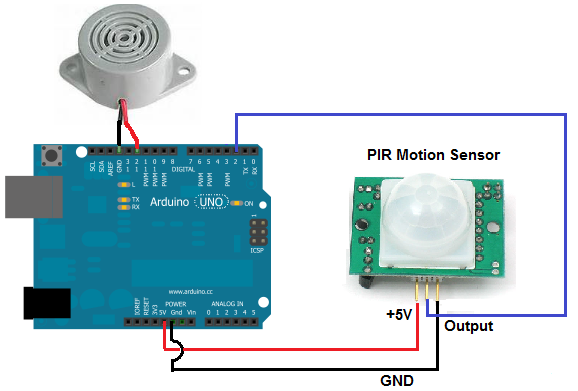
i vores kredsløb forbinder vi PIR-bevægelsessensoren til strømterminalerne på arduino og udgangsstiften til digital pin D3 på arduino. Pin 1 af PIR-sensoren forbinder til 5V-terminalen på arduino. Pin 3 forbinder til jorden (GND) terminal af arduino. Disse stifter er, hvordan bevægelsesføleren modtager den strøm, den har brug for til at fungere.
Pin 2, udgangsstiften på PIR-sensoren, forbinder til digital pin, D2, af arduino. Og det er gennem pin 3, at arduino modtager output fra bevægelsesføleren. Når bevægelsesdetektoren ikke registrerer nogen bevægelse, er udgangen lav, og arduino modtager intet spændingssignal. Når sensoren registrerer bevægelse, er udgangen høj, og arduino modtager et spændingssignal, som derefter kan udløse en anden enhed til at tænde, såsom en summer, vi vil bruge til dette kredsløb.
summeren vi vil magt forbinder pin 12 og jorden af brættet. Anoden forbinder til pin 12 og katoden forbinder til jorden.
bevægelsesdetektor Alarm kredsløb skematisk
kredsløbet, sammen med dets skematiske diagram, som vi vil bygge, er vist nedenfor:
det skematiske diagram af dette kredsløb er:
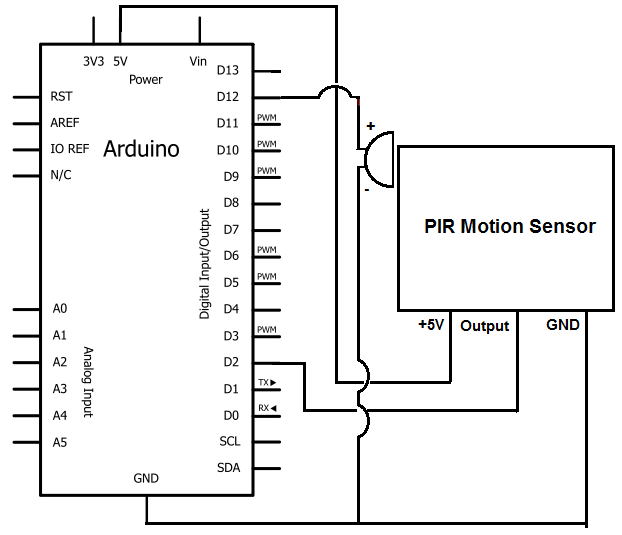
igen, når bevægelse er registreret, sender PIR-bevægelsessensoren et spændingssignal til pin D2 på arduino. Når Arduino-kortet registrerer dette signal, tænder det summeren, der er tilsluttet pin D12 på arduino.
dette gøres i programmer. Vi skriver et program, der tænder summeren, når der modtages et HØJSPÆNDINGSSIGNAL ved pin D2 fra Pir-bevægelsessensoren.
kode til bevægelsesdetektor Alarm kredsløb
følgende kode eller skitse tænder summeren på pin 12, Når sensoren registrerer bevægelse:
//kode til bevægelsesdetektor alarm kredsløb
const int summerpin= 12;
const int inputPin= 2;
void setup(){
pinMode(summerpin, output);
pinMode(Inputpin, input);
}
void loop(){
int value= digitalread(inputpin);
hvis (værdi == høj)
{
digitalskriv (summerpin, høj);
}
}
den første blok kode vælger pin til summeren, som er pin 12. Den anden linje vælger stiften til indgangsstiften, som repræsenterer PIR-sensoren, pin 2.
den anden blok af kode erklærer summeren som output og udgangen af PIR bevægelsesføleren som input.
den tredje blok af kode læser inputværdien og tildeler den til det heltal, der hedder værdi. Det læser, om input pin er høj eller lav. Hvis den er høj, har bevægelsesføleren registreret bevægelse. Hvis den er lav, har sensoren ikke registreret nogen bevægelse. Hvis værdien er høj, tænder den summeren og signalerer, at bevægelse faktisk er blevet detekteret. Når bevægelse er blevet registreret, lyder summeren og forbliver tændt. Det slukker ikke.Dette simulerer et faktisk alarmsystem i det virkelige liv, hvor en alarm slukker og ikke slukker, medmindre husejeren manuelt lukker den af.
flere variationer af dette kredsløb kan gøres for at passe til dine behov. Måske vil du ikke have en summer til at lyde, og du vil faktisk have sirener til at gå ud. I så fald ville du bytte summeren ud for sirener. Måske vil du have sirener og en summer til at gå ud. I så fald ville du forbinde summeren og sirenen parallelt. Medtilstrækkelig strøm vil begge gå ud, når alarmen udløses af bevægelse. Du kan tilpasse kredsløbet, så det passer til dine behov.
og sådan kan et grundlæggende bevægelsesdetektoralarmkredsløb fungere.
for at se, hvordan dette kredsløb fungerer i det virkelige liv, se videoen nedenfor.